Fabrics are key materials for a variety of applications that require flexibility, breathability, small storage footprint, and low weight. While fabrics are conventionally passive materials with static properties, emerging technologies have provided many flexible materials that can respond to external stimuli for actuation, structural control, and sensing. Here, we improve upon and process these responsive materials into functional fibers that we integrate into everyday fabrics and demonstrate as fabric-based robots that move, support loads, and allow closed-loop controls, all while retaining the desirable qualities of fabric. Robotic fabrics present a means to create smart adaptable clothing, self-deployable shelters, and lightweight shape-changing machinery.
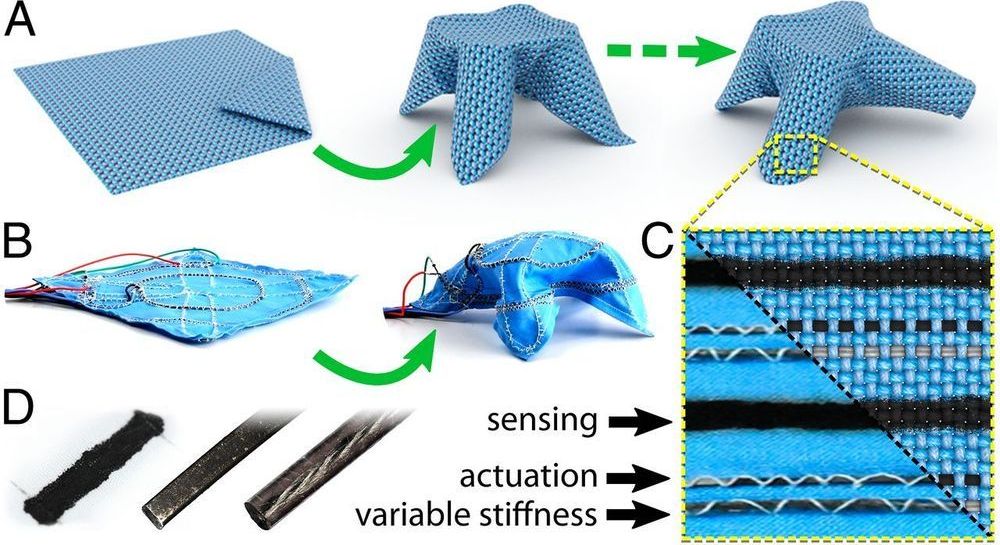
Fabrics are ubiquitous materials that have conventionally been passive assemblies of interlacing, inactive fibers. However, the recent emergence of active fibers with actuation, sensing, and structural capabilities provides the opportunity to impart robotic function into fabric substrates. Here we present an implementation of robotic fabrics by integrating functional fibers into conventional fabrics using typical textile manufacturing techniques. We introduce a set of actuating and variable-stiffness fibers, as well as printable in-fabric sensors, which allows for robotic closed-loop control of everyday fabrics while remaining lightweight and maintaining breathability. Finally, we demonstrate the utility of robotic fabrics through their application to an active wearable tourniquet, a transforming and load-bearing deployable structure, and an untethered, self-stowing airfoil.