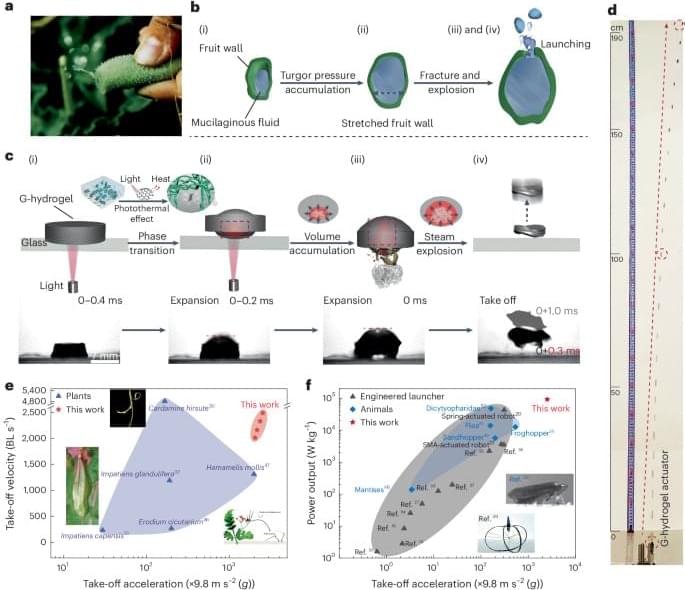
Fracture-driven power amplification in a hydrogel launcher
Propulsive motion in soft robotic systems requires the power amplification of stored energy. An accumulated strain energy-fracture power-amplification method is used to create light-driven soft robotic systems with a controlled launching ability.