Early brain development is a biological black box. While scientists have devised multiple ways to record electrical signals in adult brains, these techniques don’t work for embryos.
A team at Harvard has now managed to peek into the box—at least when it comes to amphibians and rodents. They developed an electrical array using a flexible, tofu-like material that seamlessly embeds into the early developing brain. As the brain grows, the implant stretches and shifts, continuously recording individual neurons without harming the embryo.
“There is just no ability currently to measure neural activity during early neural development. Our technology will really enable an uncharted area,” said study author Jia Liu in a press release.
A research team led by Professor Huang Xingjiu at the Hefei Institutes of Physical Science of the Chinese Academy of Sciences has developed a highly stable adaptive integrated interface for ion sensing. The study was published as an inside front cover article in Advanced Materials.
All-solid-state ion-selective electrode serves as a fundamental component in the ion sensing of intelligent biological and chemical sensors. While the researchers had previously developed several transducer materials with a sandwich-type interface to detect common ions, the performance of such sensors was often limited by interface material and structure.
To overcome these challenges, the team introduced a novel interface using lipophilic molybdenum disulfide (MoS₂) regulated by cetyltrimethylammonium (CTA⁺). This structure enables spatiotemporal adaptive integration—assembling single-piece sensing layers atop efficient transduction layers.
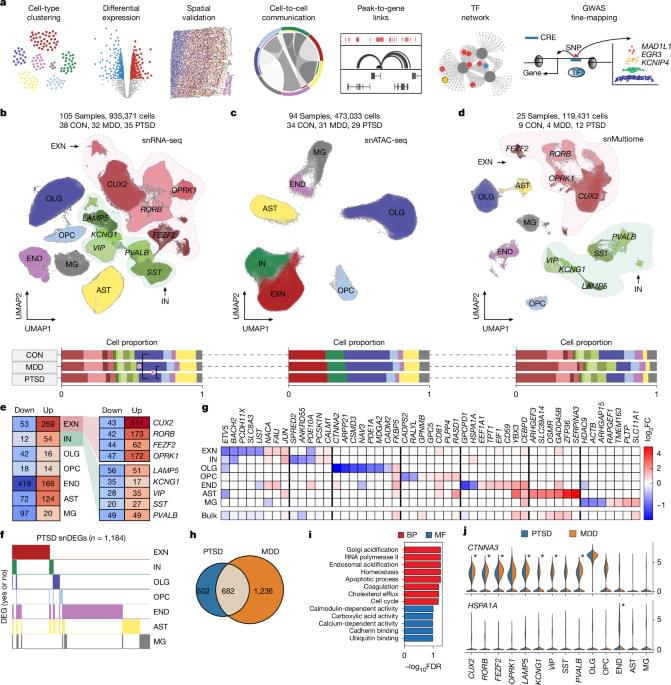
A comprehensive analysis of the cell-specific molecular regulatory mechanisms underlying post-traumatic stress disorder in the human prefrontal cortex.
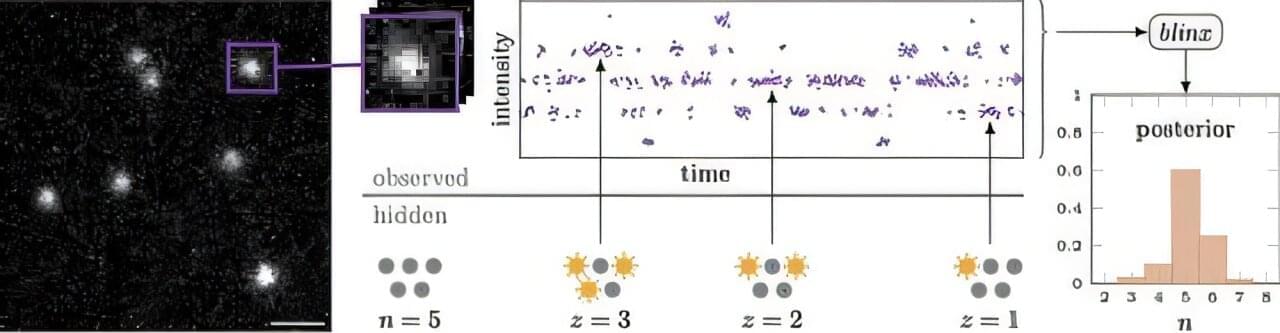
Imagine you’re sitting at a pond, listening to the din of croaking frogs. You want to know how many frogs are in the pond, but you can’t pick out the individual croaks—only the combined sound rising and falling in volume as frogs start and stop communicating.
But what if you were able to examine these volume changes to figure out how many frogs are in the pond?
That’s the idea behind a new method developed by the Funke Lab at Janelia to count the individual molecules contained in a single spot of light detected by a fluorescence microscope—a quantity important for understanding the underlying biology of a living system. The paper is published in the journal Nano Letters.
Does Nature Obey Laws? | Sheldrake-Vernon Dialogue 95.
The conviction that the natural world is obedient, adhering to laws, is a widespread assumption of modern science. But where did this idea originate and what beliefs does it imply? In this episode of the Sheldrake-Vernon Dialogues, Rupert Sheldrake and Mark Vernon discuss the impact on science of the Elizabethan lawyer, Francis Bacon. His New Instrument of Thought, or Novum Organum, put laws at the centre of science and was intended as an upgrade on assumptions developed by Aristotle. But does the existence of mind-like laws of nature, somehow acting on otherwise mindless matter, even make sense? What difference is made by insights subsequent to Baconian philosophy, such as the discovery of evolution or the sense that the natural world is not machine-like but behaves like an organism? Could the laws of nature be more like habits? And what about the existence of miracles, the purposes of organisms, and the extraordinary fecundity of creativity?
— Dr Rupert Sheldrake, PhD, is a biologist and author best known for his hypothesis of morphic resonance. At Cambridge University, as a Fellow of Clare College, he was Director of Studies in biochemistry and cell biology. As the Rosenheim Research Fellow of the Royal Society, he carried out research on the development of plants and the ageing of cells, and together with Philip Rubery discovered the mechanism of polar auxin transport. In India, he was Principal Plant Physiologist at the International Crops Research Institute for the Semi-Arid Tropics, where he helped develop new cropping systems now widely used by farmers. He is the author of more than 100 papers in peer-reviewed journals and his research contributions have been widely recognized by the academic community, earning him a notable h-index for numerous citations. On ResearchGate his Research Interest Score puts him among the top 4% of scientists.
A collaborative effort between Meta, Lawrence Berkeley National Laboratory and Los Alamos National Laboratory leverages Los Alamos’ expertise in building tools for molecular screening capabilities. The release of “Open Molecules 2025”, an unprecedented dataset of molecular simulations, can accelerate opportunities for machine learning to transform research in fields such as biology, materials science and energy technologies.
Earthworms often form a cluster, from which they can barely free themselves. A similarly active, writhing structure forms when the tentacles of lion’s mane jellyfish become entangled. Robotic grippers utilize this principle by using multiple synthetic flexible arms to grip and move objects. And such interlinked self-propelled filaments can also be found at the smaller micrometer scale, for example in a biological cell.
After a Chicago-sized iceberg broke off from Antarctica, a research vessel changed plans and went to explore an underwater world never seen before by humans.
Researchers and crewmembers aboard the Schmidt Ocean Institute’s Falkor (too), “seized upon the moment” that was presented to them, and in doing so produced the first oceanographical, biological, and geological study of the area.
Located in the Bellingshausen Sea, the King George VI ice shelf, one of the massive, mostly seaborne glaciers that sit attached to the continent of Antarctica, lost a chunk of ice the size of the greater Chicago area, or around 209 square miles.



{kind=link}