Segregation of chromosomes in dividing cells can be disrupted if the cells are constrained by their surroundings.
One of the aberrant features of cancer cells is a failure to distribute chromosomes properly when the cells divide. Researchers have now found that a specific problem with the chromosome-distribution machinery can become more common in cancer cells confined within shallow microscopic channels—but also that, surprisingly, increasing the physical constraints can suppress these errors [1]. Such confinement mimics the effects of crowding by surrounding cells in a tumor, and the researchers believe the results might help to explain what goes awry in cancers and perhaps offer clues to how it might be put right.
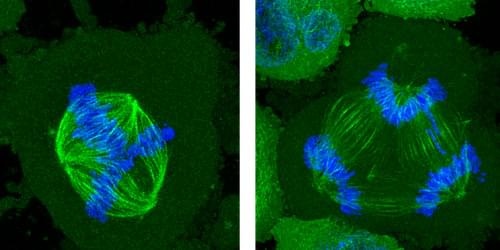
In a healthy, dividing cell, after the genome is replicated, the chromosomes are segregated into two groups. Both groups are bound to the mitotic spindle, a bundle of aligned filaments (called microtubules) that are pinched together at the ends into structures called poles. The chromosomes are then drawn along the microtubules toward the poles. A key cause of improper chromosome segregation in cancer cells is the formation of spindles with more than two poles. Multipolar spindle formation inside living organisms may differ from the phenomenon when observed in cells grown in a dish [2], so it is possible that the confining effect of the surrounding cells in a tissue has some influence on this process.



{kind=link}