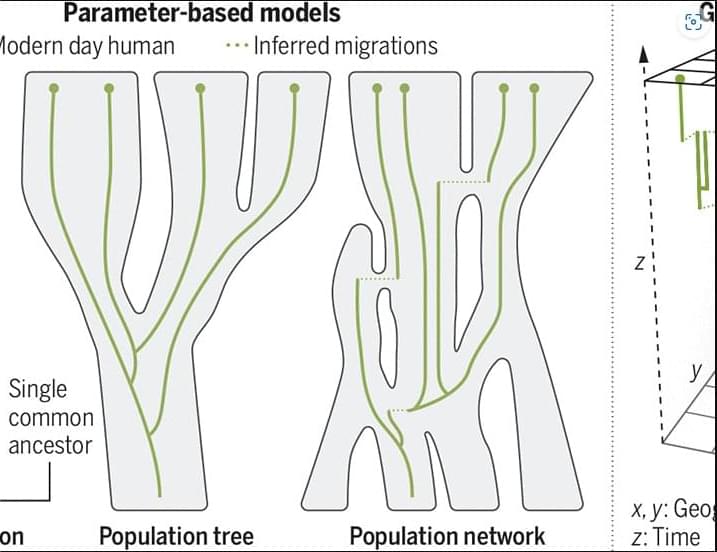
Tracking the geographic origins of genetic ancestors reveals past human migrations
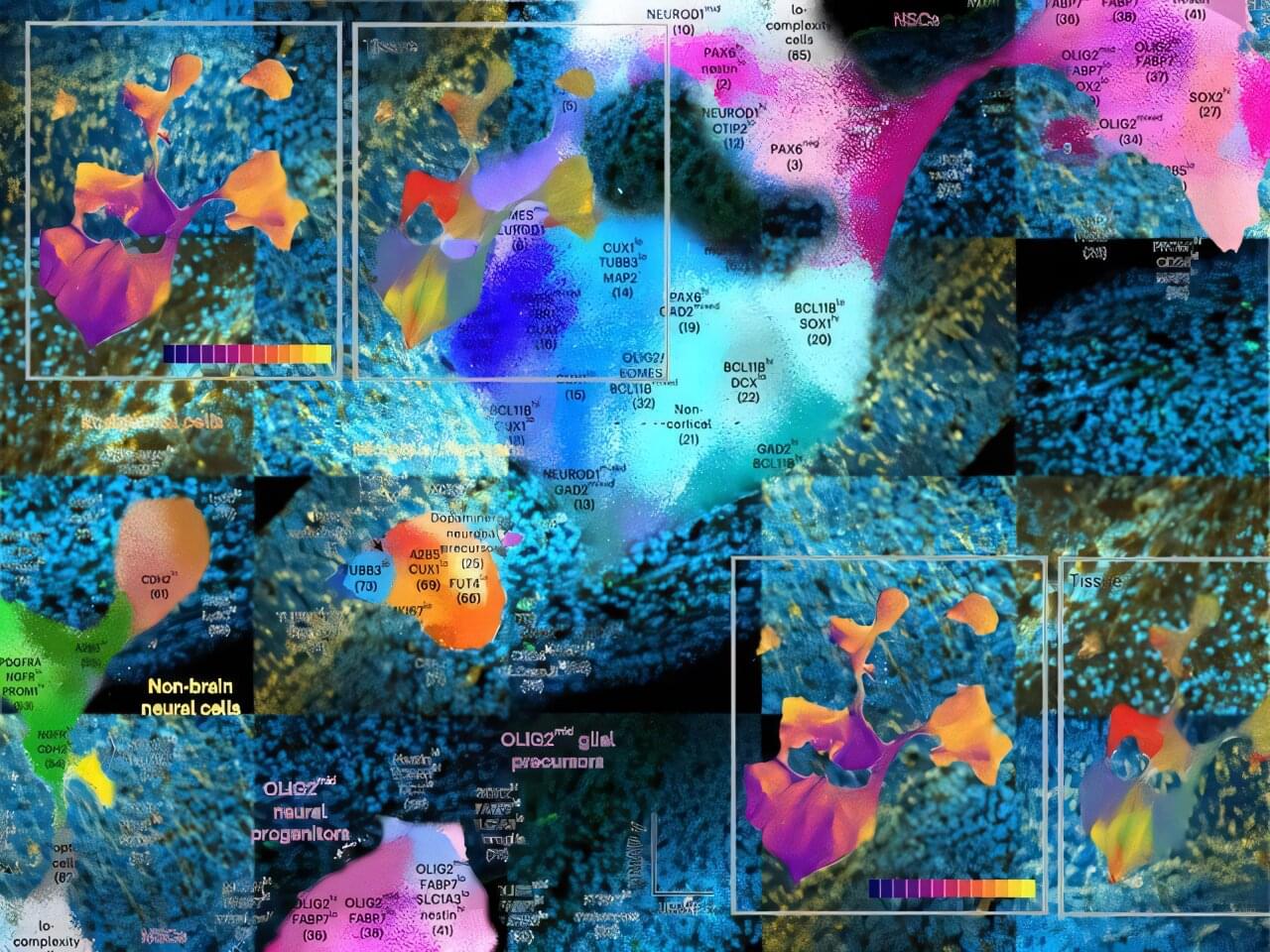
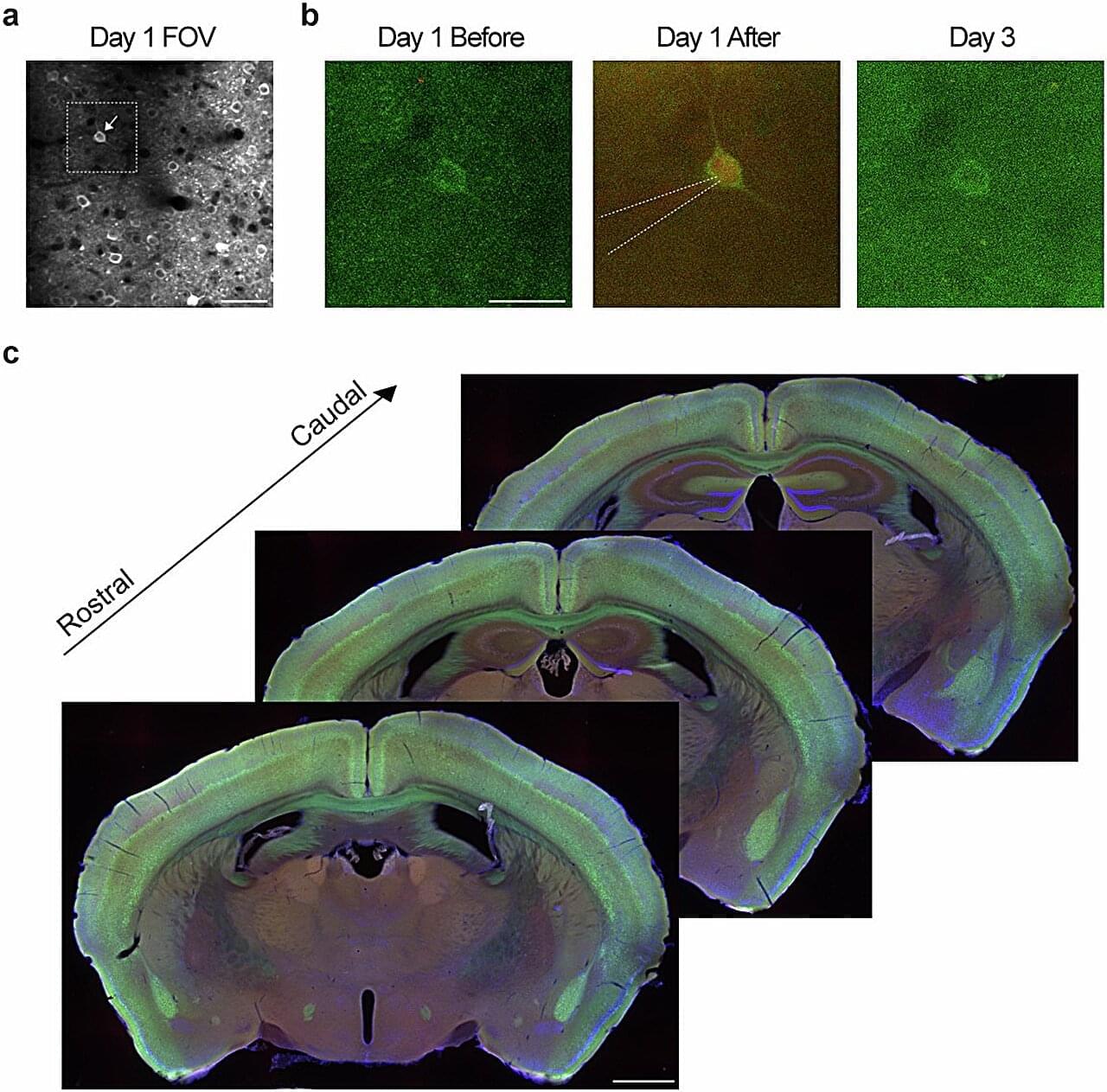
Researchers at the University of Virginia have created the first comprehensive protein-level atlas of brain development, providing unprecedented insight into how the brain forms and potential implications for understanding neurological disorders. The study, published in Nature Neuroscience, analyzed over 24 million individual cells from mouse brains, revealing detailed molecular pathways that guide brain development from early embryonic stages through early postnatal development.
The research team, led by Professors Christopher Deppmann and Eli Zunder, used an innovative technique called mass cytometry to track 40 different proteins across various brain regions and developmental stages. The approach provided a more detailed view of cellular function than previous studies that primarily examined RNA.
“While RNA studies have given us important insights, proteins are the actual workforce of cells,” explained Deppmann, a professor in the College and Graduate School of Arts & Sciences’ Department of Biology. “By studying proteins directly, we can better understand how cells are functioning and communicating during brain development.”
Physicists have made a major leap in our understanding of quantum entanglement by fully mapping out the statistics it can produce – essentially decoding the language of the quantum world.
This breakthrough reveals how the bizarre but powerful correlations in quantum systems can be used to test, secure, and certify the behavior of quantum devices, all without knowing their inner workings. The ability to self-test even partially entangled systems now opens doors to more robust quantum communication, encryption, and computing methods. It’s a game-changer for both fundamental physics and real-world quantum tech.
Cracking the code of quantum entanglement.
Well done Gaia & crew. [ https://www.spacedaily.com/reports/Star-mapping_space_telesc…t_999.html](https://www.spacedaily.com/reports/Star-mapping_space_telesc…t_999.html)
After more than a decade mapping out our home galaxy, the Gaia space telescope was powered down and sent into “retirement orbit” around the Sun on Thursday, the European Space Agency said.
Since launching in 2013, the telescope has been charting the positions, motion and properties of nearly two billion stars to create a vast map of the Milky Way, revealing many secrets of the cosmos along the way, the ESA said in a statement.
Gaia uncovered evidence of massive galaxies slamming into each other, identified vast clusters of stars, helped discover new exoplanets and mapped millions of galaxies and blazing galactic monsters called quasars.
This week, ALMA researchers reported the discovery of oxygen in the most distant known galaxy. Geologists believe unusual structures in rock in the desert regions of Namibia, Oman and Saudia Arabia may be evidence of an unknown microorganism. And a group of physicists may have generated a tiny charge of electricity using the Earth’s rotational energy. But the biggest story by far is the second release of data from the DESI survey of the universe, which could upend the standard model:
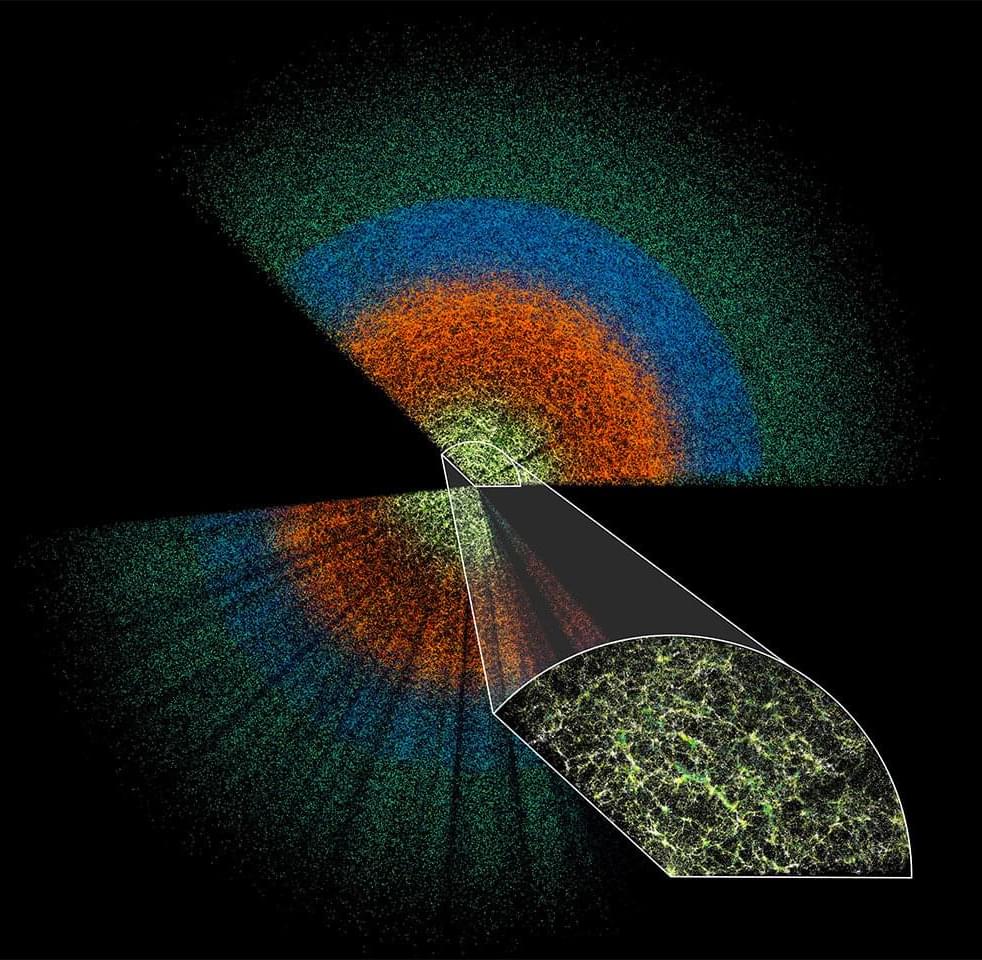
An emerging generation of cosmological surveys launched this week with the second release of data from the Dark Energy Spectroscopic Instrument at Kitt Peak National Observatory in Arizona, which is mapping an unprecedentedly huge number of galaxies spanning 11 billion years of cosmic history in order to better understand dark energy.
Astronomers have known for many decades that the universe is expanding; in the 1990s, the first image of the cosmic microwave background—the echo of the big bang—revealed that this expansion is accelerating for unknown reasons. Astronomers call this expansion “dark energy,” which translates to “we don’t understand what this energy is.”
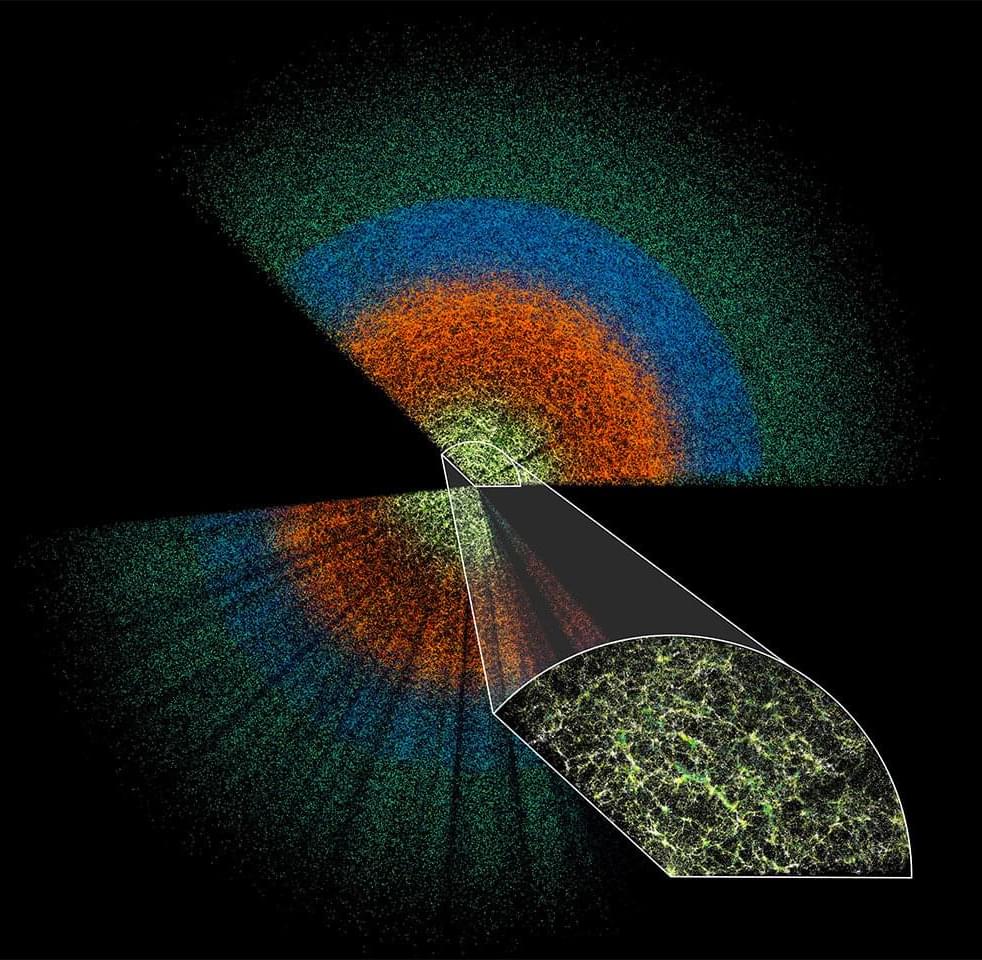
The Dark Energy Spectroscopic Instrument (DESI) is mapping millions of celestial objects to better understand dark energy—the mysterious driver of our universe’s accelerating expansion. Today, the DESI collaboration released a new collection of data for anyone in the world to investigate.
The dataset is the largest of its kind, with information on 18.7 million objects: roughly 4 million stars, 13.1 million galaxies, and 1.6 million quasars (extremely bright but distant objects powered by supermassive black holes at their cores).
While the experiment’s main mission is illuminating dark energy, DESI’s Data Release 1 (DR1) could yield discoveries in other areas of astrophysics, such as the evolution of galaxies and black holes, the nature of dark matter, and the structure of the Milky Way.

Discovering new deposits of critical and rare earth minerals is paramount to delivering global net-zero ambitions. However, finding new ore bodies is becoming more challenging due to increasing costs and geopolitical tensions. What is more, much of the low-hanging fruit, so to speak, has already been exploited.
Could technological advances help broaden the search and speed up the process? Dr Bryony Richards, a senior research scientist with the Energy & Geoscience Institute at the University of Utah in the US, believes so.
Richards and her colleagues are incorporating NASA’s and Japan’s global Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER) imagery with that of new satellite data, advances in computing power and AI. With this approach, they are developing a comprehensive first-of-a-kind method to uncover the ‘fingerprints’ of mineral deposits that could eventually provide a more cost and time-effective way of mapping minerals in remote areas.
Researchers in Utah are combining satellites, hyperspectral imaging and AI to discover mineral deposits in remote locations.

Based on how an AI model transcribes audio into text, the researchers behind the study could map brain activity that takes place during conversation more accurately than traditional models that encode specific features of language structure — such as phonemes (the simple sounds that make up words) and parts of speech (such as nouns, verbs and adjectives).
The model used in the study, called Whisper, instead takes audio files and their text transcripts, which are used as training data to map the audio to the text. It then uses the statistics of that mapping to “learn” to predict text from new audio files that it hasn’t previously heard.
National Institutes of Health researchers have mapped how individual neurons in the primary somatosensory cortex receive brain-wide presynaptic inputs that encode behavioral states, refining our understanding of cortical activity.
Neurons in the primary somatosensory cortex process different types of sensory information and exhibit distinct activity patterns, yet the cause of these differences has remained unclear. Previous research emphasized the role of motor cortical regions in movement-related processing, but also recognized that the thalamus plays a role beyond sensory relay.
Using high-resolution single-cell mapping to trace neuronal connectivity, the team revealed that thalamic input is the primary driver for movement-correlated neurons, while motor cortical input plays a smaller role.