Intelligence is officially a liquid asset. Walk into the boardroom of any forward-thinking enterprise today, and the very definition of labor, output, and corporate potential has fundamentally shifted.


Nothing rivals the human brain’s complexity. Its 86 billion neurons and 85 billion other cells make an estimated 100 trillion connections. If the brain were a computer, it would perform an exaflop (a billion-billion) mathematical calculations every second and use the equivalent of only 20 watts of power. As impressive as the brain is, neurologists can’t fully explain how neurons work together.
To help find answers, researchers at the Institute for Neuroscience, Neurotechnology, and Society (INNS) at Georgia Tech are using math, data, and AI to unlock the secrets of thought. Together they are helping turn the brain’s raw electrical “noise” into real insights about how people think, move, and perceive the world.
Fair warning: Prepare your neurons for the complexity of this brain research ahead.

While technology has made the world “smaller,” it has also pulled individuals apart, thanks to mobile phones and other devices that command our attention. Cornell University researchers are using technology, in the form of a mirror-equipped robot, to help bring people together. Members of the Architectural Robotics Lab, led by Keith Evan Green, have built a four-foot-tall robot—dubbed MirrorBot—with dual mirrors that, when placed in front of a pair of strangers, let each participant see themself in one mirror and the other person in the other.
In a study involving participants in a waiting-room setting, MirrorBot spurred conversations, playful exchanges and other interactions between strangers. The findings suggest that robots can act not only as conversational partners, but also as spatial mediators. The research is published in the journal Proceedings of the 21st ACM/IEEE International Conference on Human-Robot Interaction.
“We weren’t just trying to trigger conversations, but to support the very first moment of social connection, which is the eye contact,” said Serena Guo, lead author of the paper.
By Chuck Brooks
Artificial intelligence has entered a new phase of strategic consequence, and executives, policymakers, and small business owners can no longer afford to treat it as a back-office technology decision. The central question is no longer whether an organization will use AI. It is how much of that AI the organization will actually own.
Sovereign AI—the end-to-end ownership of the data, the model, and the interaction layer that connects them to the people who depend on them—is rapidly moving from a geopolitical discussion into a board-level and Main Street requirement.
Sovereign AI has largely been framed as a national concern, but that framing is incomplete. The same logic that compels a nation to own its AI stack compels a hospital system, a regional bank, a defense supplier, and a mid-sized manufacturer to do the same.
For a fixed number of configurations, representing quantum states becomes less accurate as their non-stabilizerness increases. This demonstrates a clear limit to how well restricted Boltzmann machines can compress and represent highly entangled systems. Calculations using ground states of medium-mass atomic nuclei reveal non-stabilizerness as a key property governing neural network performance.
In patients with Huntington disease, vesicular monoamine transporter 2 inhibitors (VMAT2is) treatment improved chorea without significant changes in adverse effects or depressive symptoms.
This website uses a security service to protect against malicious bots. This page is displayed while the website verifies you are not a bot.
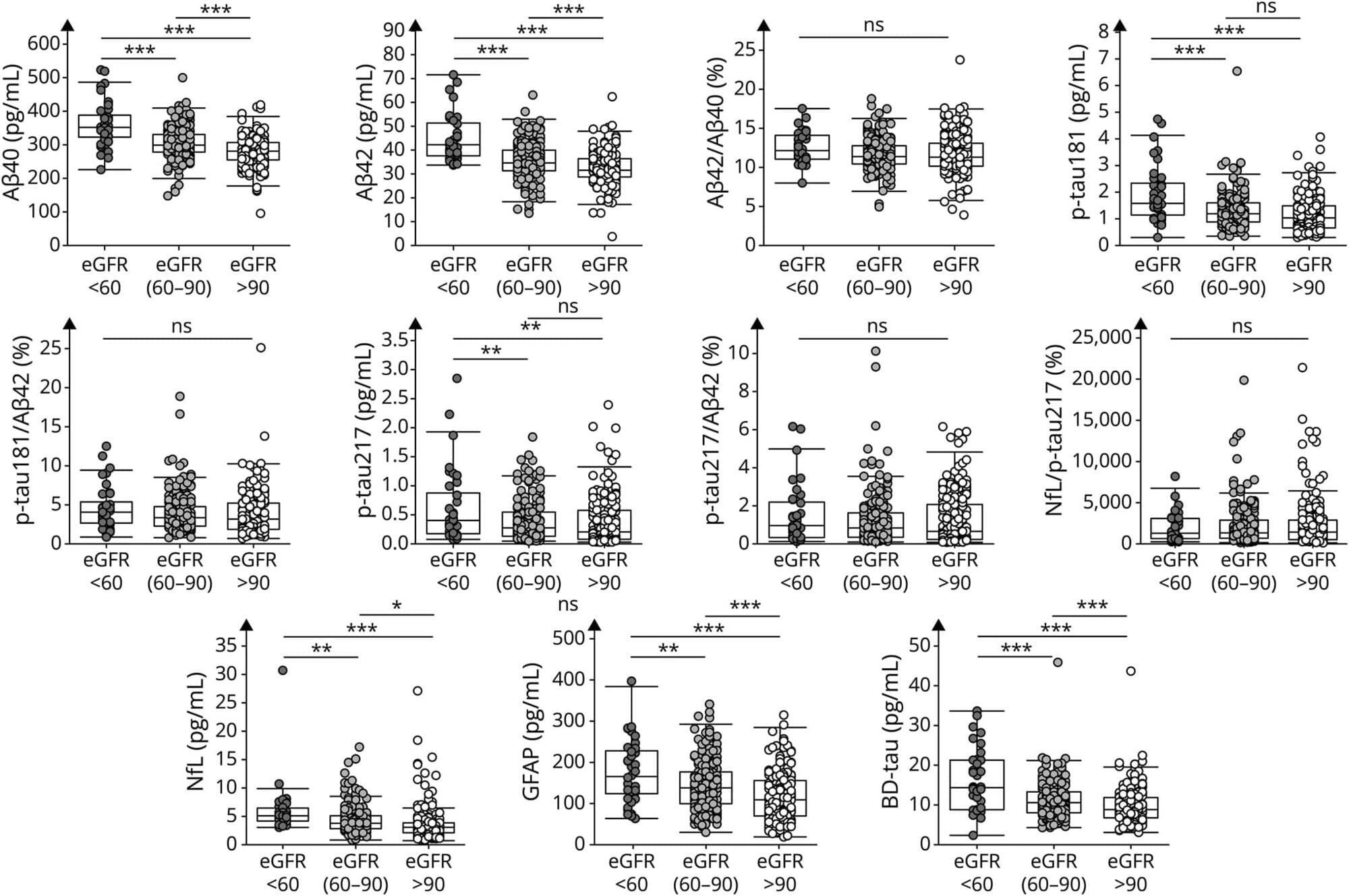
This study found that impaired kidney function was linked to increased plasma cerebral amyloidosis biomarkers, but ratio-based measures showed stable sensitivity and specificity for detecting cerebral amyloidosis across all eGFR groups.
This website uses a security service to protect against malicious bots. This page is displayed while the website verifies you are not a bot.
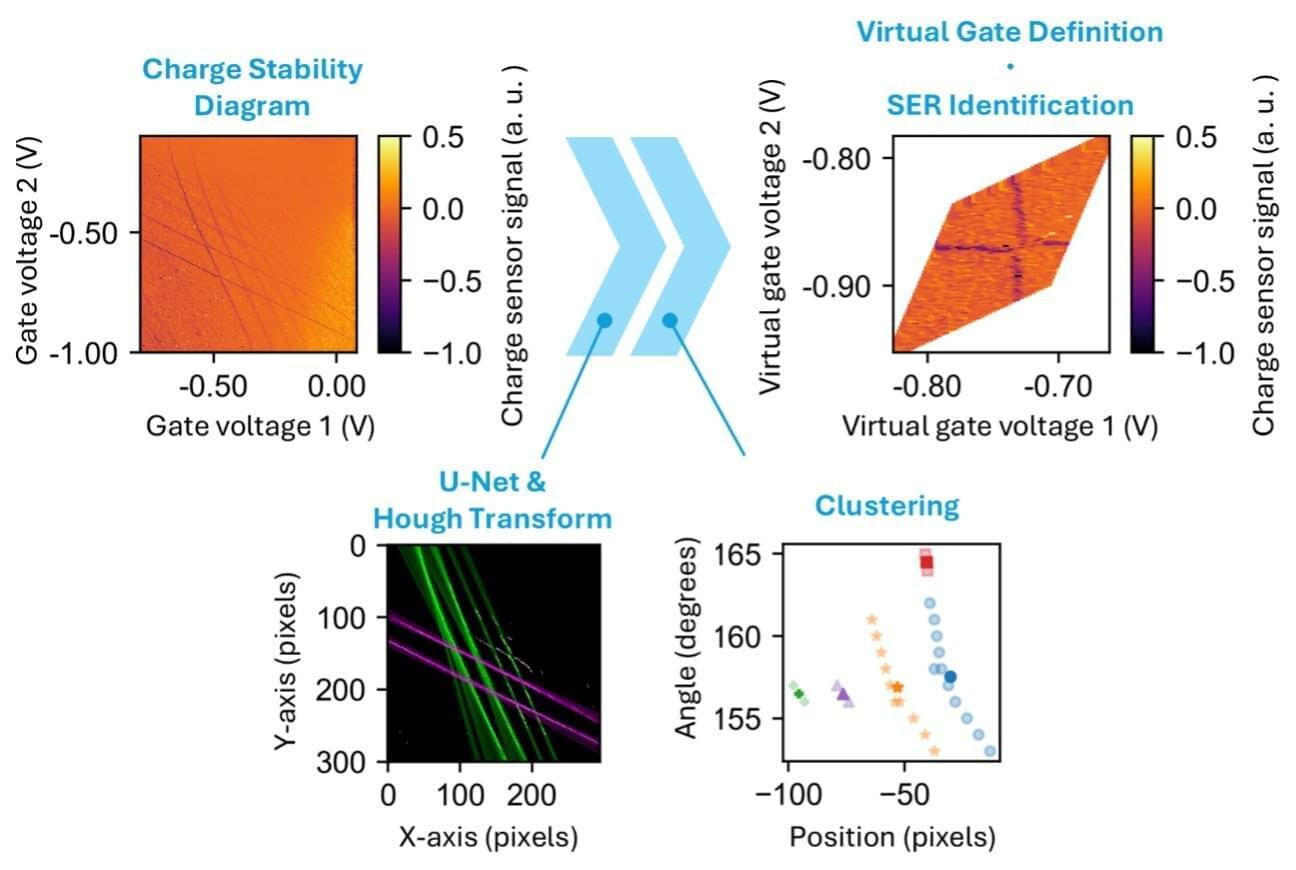
Semiconductor spin qubits are a promising candidate for the building blocks of next-generation quantum computers due to their high potential for integration and compatibility with existing semiconductor technologies. Qubits—like the 0s and 1s of a traditional computer—serve as a basic unit of information for quantum computers. However, the practical realization of these computers requires a massive number of qubits, making the development of more efficient adjustment methods a critical challenge for the field.
A research group including Yui Muto from Tohoku University’s Graduate School of Engineering, Assistant Professor Motoya Shinozaki and Associate Professor Tomohiro Otsuka from the Advanced Institute for Materials Research (WPI-AIMR), and their colleagues have successfully demonstrated a method that may help make this massive number of qubits much more manageable, moving us one step closer toward scaling up quantum computing. The findings are published in Scientific Reports.