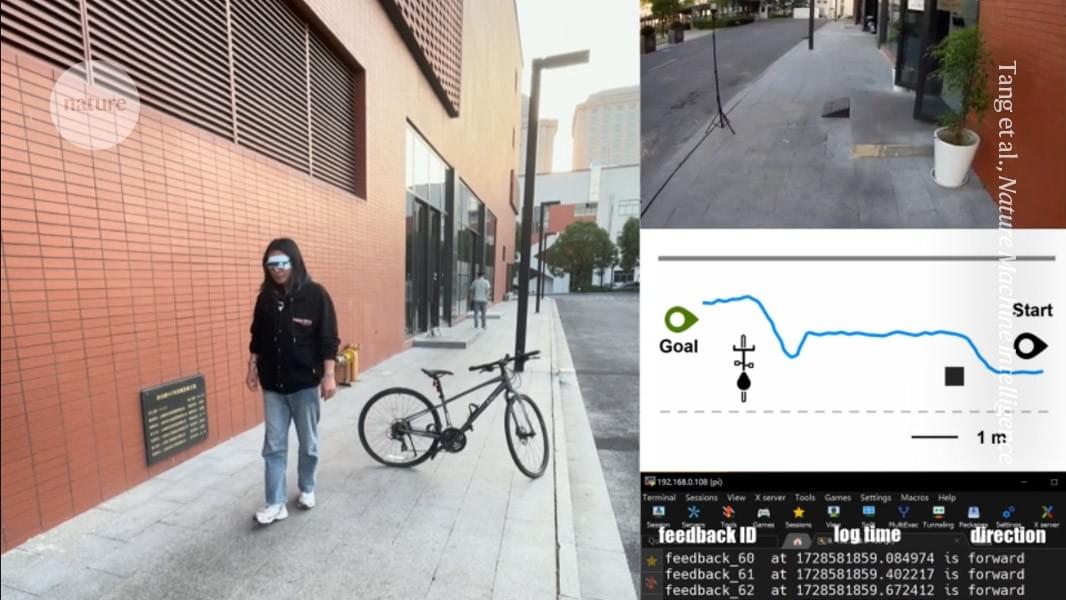
A prototype wearable system uses machine-learning to guide users around obstacles.
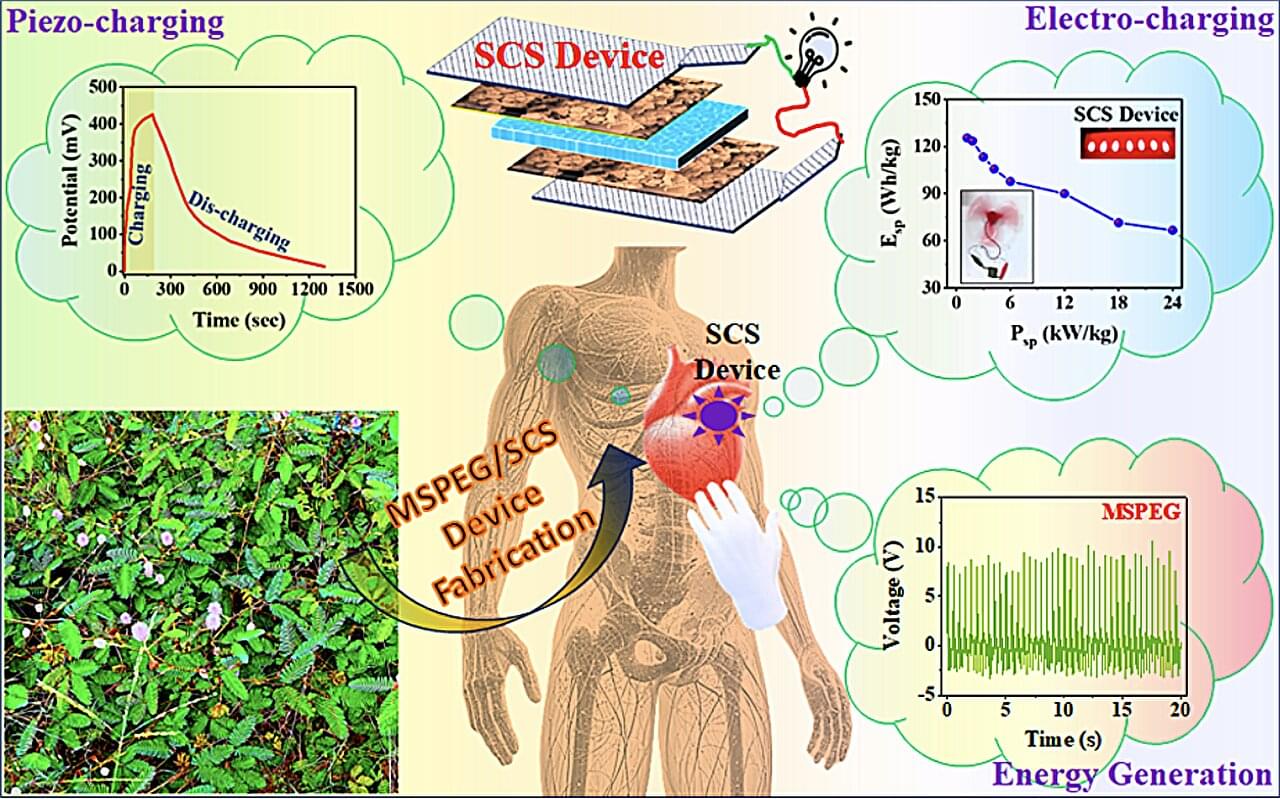
Most energy generators currently employed within the electronics industry are based on inorganic piezoelectric materials that are not bio-compatible and contribute to the pollution of the environment on Earth. In recent years, some electronics researchers and chemical engineers have thus been trying to develop alternative devices that can generate electricity for medical implants, wearable electronics, robots and other electronics harnessing organic materials that are safe, bio-compatible and non-toxic.
Researchers at the Materials Science Centre, Indian Institute of Technology Kharagpur recently introduced a new device based on seeds from the mimosa pudica plant, which can serve both as a bio-piezoelectric nanogenerator and a self-chargeable supercapacitor. Their proposed device, outlined in a paper published in the Chemical Engineering Journal, was found to achieve remarkable efficiencies, while also having a lesser adverse impact on the environment.
“This study was motivated by the need for biocompatible, self-sustaining energy systems to power implantable medical devices (e.g., pacemakers, neurostimulators) and wearable electronics,” Prof. Dr. Bhanu Bhusan Khatua, senior author of the paper, told Tech Xplore.

A team of engineers at Georgia Institute of Technology’s Wearable Intelligent Systems and Healthcare Center, working with colleagues affiliated with several institutions in South Korea, has developed a microscale brain–computer interface that is small enough to be placed between hair follicles on a user’s head.
In their paper published in the Proceedings of the National Academy of Sciences, the group describes how they made their interface, how it attaches to other hardware to allow readings to be captured and how well it worked during testing.
Over the past several decades, brain–computer interfaces have been developed that are capable of reading brain waves and responding to them in useful ways. These devices can be used to control a cursor on a computer screen, for example, or to choose buttons to press. Such devices are still in limited use, however, mainly due to their bulky nature. In this new effort, the researchers have developed a sensor so small it can be placed on the scalp between hair follicles.
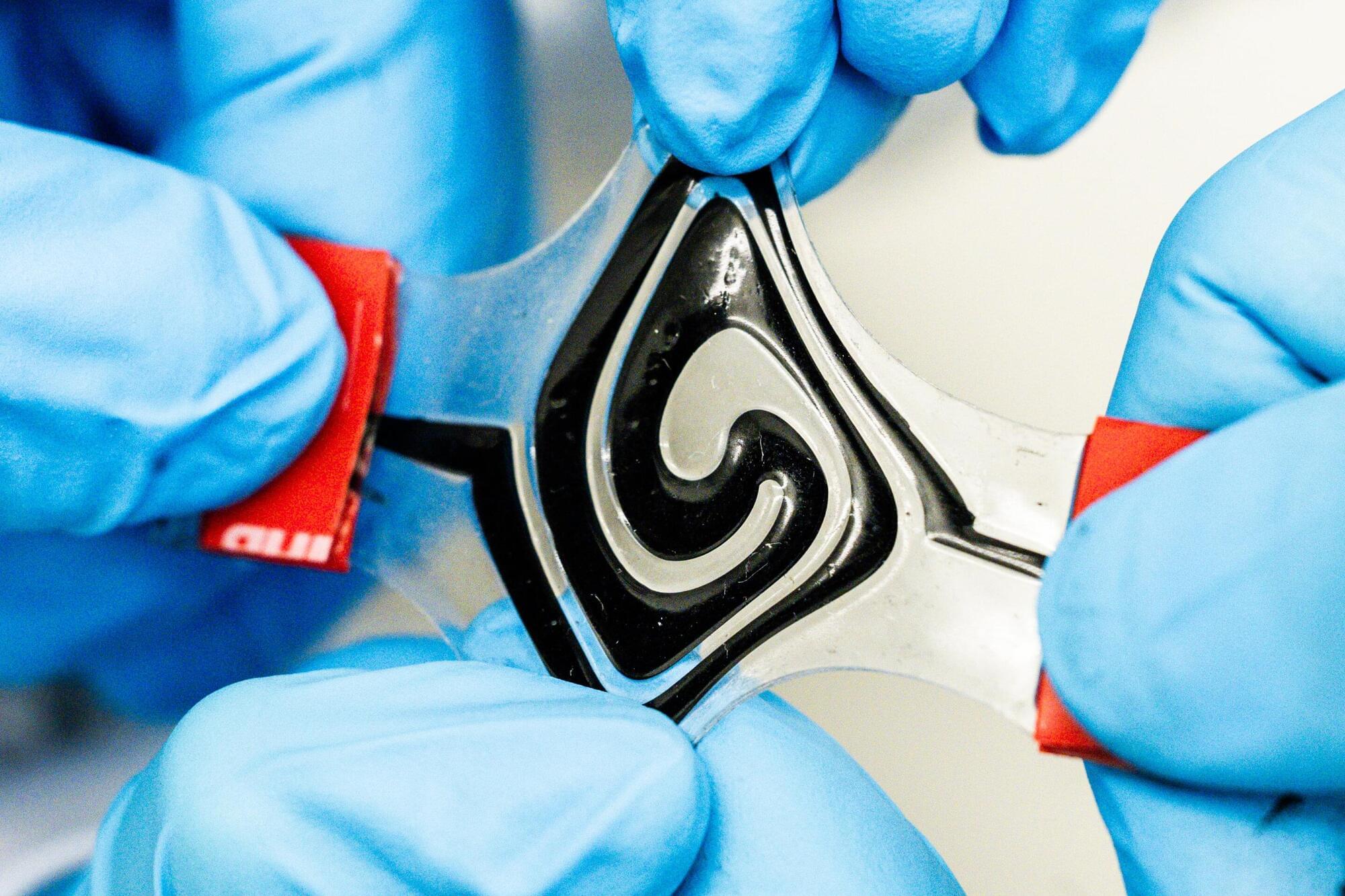
Using electrodes in a fluid form, researchers at Linköping University have developed a battery that can take any shape. This soft and conformable battery can be integrated into future technology in a completely new way. Their study has been published in the journal Science Advances.
“The texture is a bit like toothpaste. The material can, for instance, be used in a 3D printer to shape the battery as you please. This opens up for a new type of technology,” says Aiman Rahmanudin, assistant professor at Linköping University.
It is estimated that more than a trillion gadgets will be connected to the Internet in 10 years’ time. In addition to traditional technology such as mobile phones, smartwatches and computers, this could involve wearable medical devices such as insulin pumps, pacemakers, hearing aids and various health monitoring sensors, and in the long term also soft robotics, e-textiles and connected nerve implants.

Wearables such as smartwatches, fitness trackers, or data glasses have become an integral part of our everyday lives. They record health data, monitor your sleep, or calculate your calorie consumption. Researchers from Karlsruhe Institute of Technology (KIT) have developed the open-source platform “OpenEarable.” It integrates a multitude of sensors into wireless earphones with the aim to enhance health measurements and safety applications in medicine, industry, and everyday life. The scientists are currently presenting their platform at Hannover Messe from March 31 to April 4.
Wearable technologies have made significant progress in recent years, but many of the existing systems are either proprietary, i.e. not customizable by others, or their measurement capabilities are limited. With OpenEarable 2.0, a research team headed by Dr. Tobias Röddiger from KIT’s TECO research group moves one step further: The open-source platform for ear-based sensor applications enables developers to create customized software. With a unique combination of sensors, more than 30 physiological parameters can be measured directly at the ear – from heart rate and breathing patterns to fatigue and body temperature. “Our aim was to create an open and high-precision solution for health monitoring that goes far beyond what is possible with today’s commercial wearables,” says Röddiger. “OpenEarable 2.0 provides a platform for researchers and developers that is easily customizable and scalable. This allows them to program the earphones individually for specific requirements.

A race is on in solar engineering to create almost impossibly-thin, flexible solar panels. Engineers imagine them used in mobile applications, from self-powered wearable devices and sensors to lightweight aircraft and electric vehicles. Against that backdrop, researchers at Stanford University have achieved record efficiencies in a promising group of photovoltaic materials.
Chief among the benefits of these transition metal dichalcogenides – or TMDs – is that they absorb ultrahigh levels of the sunlight that strikes their surface compared to other solar materials.
“Imagine an autonomous drone that powers itself with a solar array atop its wing that is 15 times thinner than a piece of paper,” said Koosha Nassiri Nazif, a doctoral scholar in electrical engineering at Stanford and co-lead author of a study published in the Dec. 9 edition of Nature Communications. “That is the promise of TMDs.”
The search for new materials is necessary because the reigning king of solar materials, silicon, is much too heavy, bulky and rigid for applications where flexibility, lightweight and high power are preeminent, such as wearable devices and sensors or aerospace and electric vehicles.
New, ultrathin photovoltaic materials could eventually be used in mobile applications, from self-powered wearable devices and sensors to lightweight aircraft and electric vehicles.

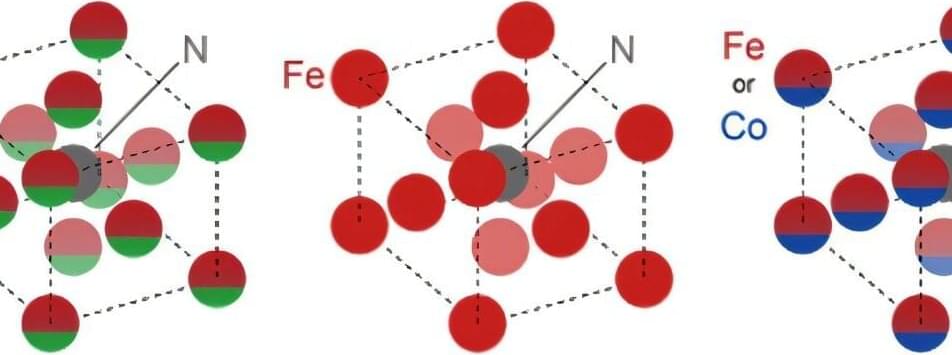
The field of spintronics, which integrates the charge and spin properties of electrons to develop electronic devices with enhanced functionality and energy efficiency, has expanded into new applications.
Beyond current technologies such as hard disk drive read heads and magnetic random-access memory (MRAM), researchers are now investigating flexible spintronics for use in wearable devices and sheet-type sensors.
For these applications, detecting small changes in mechanical stress through electrical resistance modulation is essential. This requires not only materials with significant magnetoresistance effects but also control over their magnetoelastic properties.
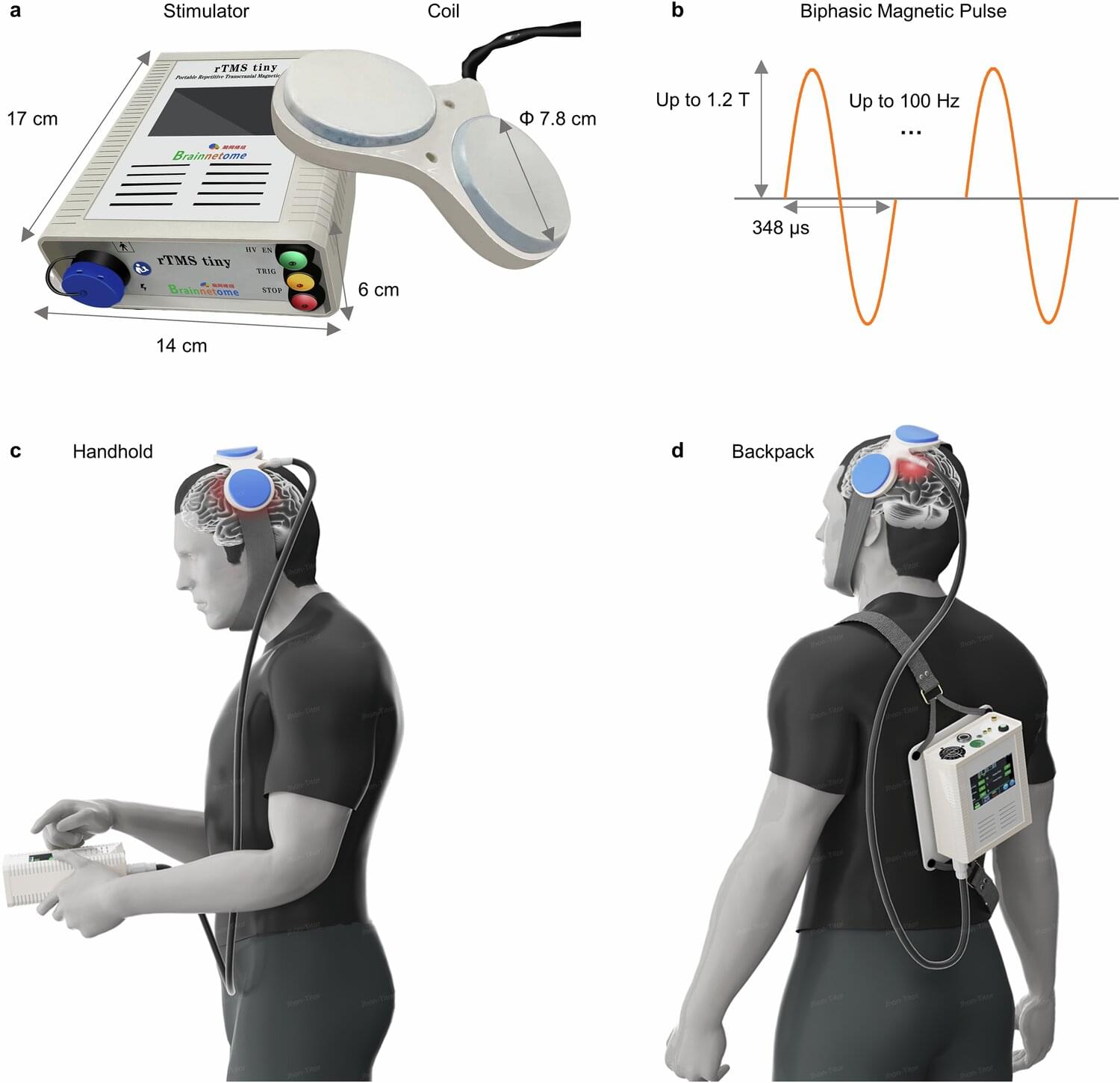
Researchers at the Institute of Automation of the Chinese Academy of Sciences have developed a compact, battery-powered brain stimulation device capable of delivering therapeutic magnetic pulses while a person is walking or performing everyday activities.
Repetitive transcranial magnetic stimulation is used to treat conditions such as depression, stroke-related motor impairment, and other neuropsychiatric disorders. It is also used in cognitive and motor function research.
Existing systems need to be plugged into a power supply and have bulky designs meant for stationary use in clinical settings. These limitations prevent stimulation during natural movement, such as standing and walking, making at-home or on-the-go treatments impractical.
A research team has developed the world’s first smartphone-type OLED panel that can freely transform its shape while simultaneously functioning as a speaker—all without sacrificing its ultra-thin, flexible properties.
The study, led by POSTECH’s (Pohang University of Science and Technology) Professor Su Seok Choi from the Department of Electrical Engineering and conducted by Ph.D. candidates Jiyoon Park, Junhyuk Shin, Inpyo Hong, Sanghyun Han, and Dr. Seungmin Nam, was published in the March online edition of npj Flexible Electronics.
As the display industry rapidly advances toward flexible technologies—bendable, foldable, rollable, and stretchable—most implementations still rely on mechanical structures such as hinges, sliders, or motorized arms. While these allow for shape adjustment, they also result in increased thickness, added weight, and limited form factor design. These drawbacks are particularly restrictive for smartphones and wearable electronics, where compactness and elegance are critical.