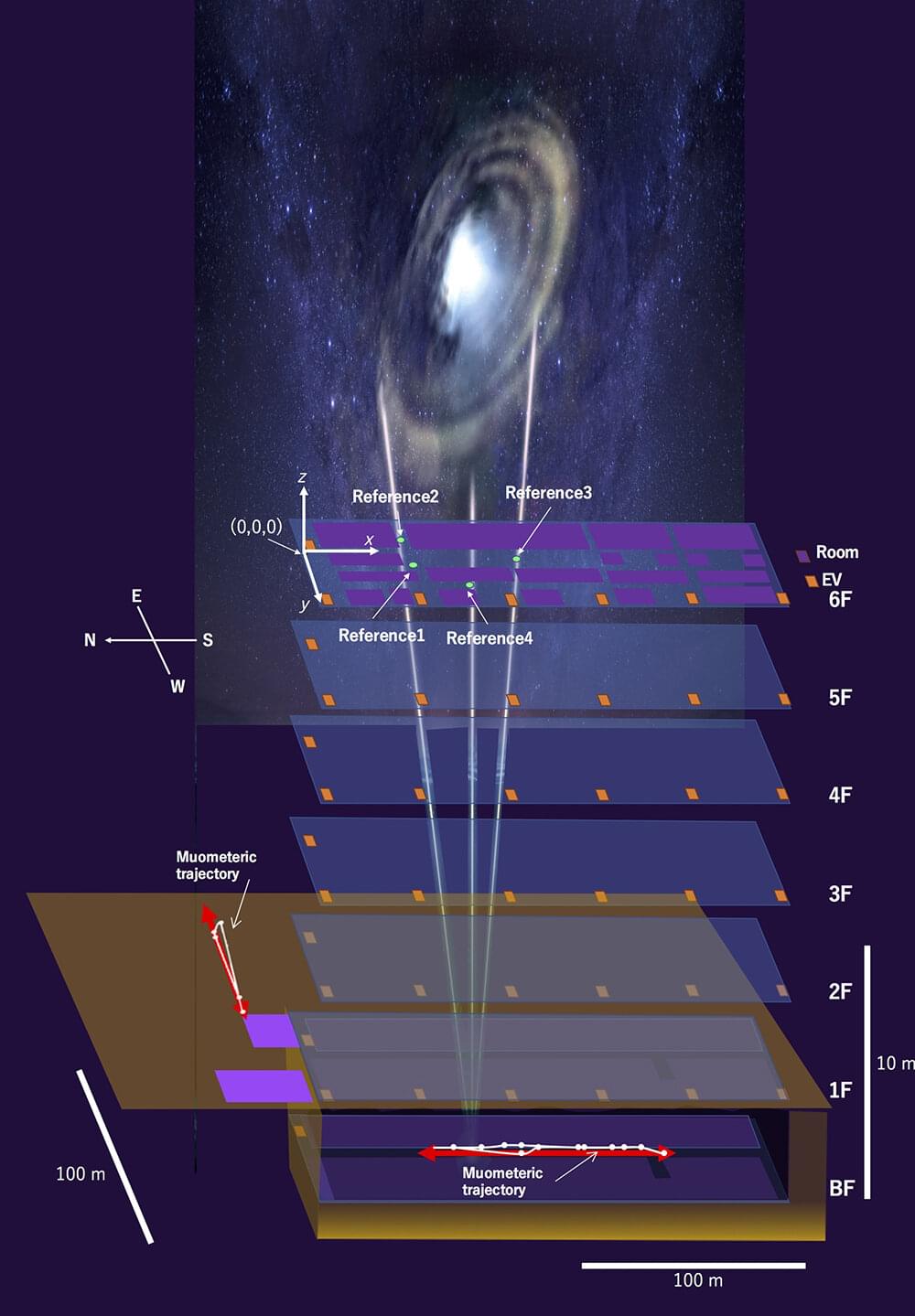
Superfast, subatomic-sized particles called muons have been used to wirelessly navigate underground for the first time. By using muon-detecting ground stations synchronized with an underground muon-detecting receiver, researchers at the University of Tokyo were able to calculate the receiver’s position in the basement of a six-story building.
As GPS cannot penetrate rock or water, this new technology could be used in future search and rescue efforts, to monitor undersea volcanoes, and guide autonomous vehicles underground and underwater. The findings are published in the journal iScience.
GPS, the global positioning system, is a well-established navigation tool and offers an extensive list of positive applications, from safer air travel to real-time location mapping. However, it has some limitations. GPS signals are weaker at higher latitudes and can be jammed or spoofed (where a counterfeit signal replaces an authentic one). Signals can also be reflected off surfaces like walls, interfered with by trees, and can’t pass through buildings, rock or water.