Over the past decade or so, roboticists and computer scientists have tried to use reinforcement learning (RL) approaches to train robots to efficiently navigate their environment and complete a variety of basic tasks. Building affordable robots that can support and manage the exploratory controls associated with RL algorithms, however, has so far proved to be fairly challenging.
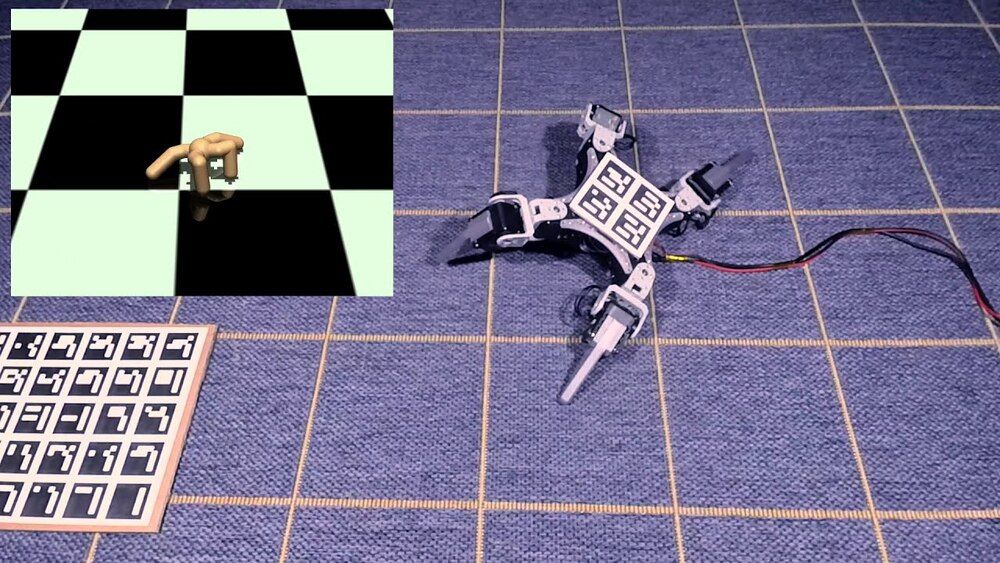
Researchers at Aalto University and Ote Robotics have recently created RealAnt, a low-cost, four-legged robot that can effectively be used to test and implement RL algorithms. The new robotics platform, presented in a paper pre-published on arXiv, is a minimalistic and affordable real-world version of the ‘Ant’ robot simulation environment, which is often used in RL research.
“The initial inspirations for our work were RL studies that successfully demonstrated learning to walk from scratch on ant-like quadruped and humanoid robot simulations,” Jussi Sainio, co-founder of Ote Robotics, told Tech Xplore. “The underlying premise with RL algorithms is that programming a robot to do tasks becomes much easier and more ‘natural’—one just needs to define the available sensor measurements, motor actions, then set a target goal and plug them all into a reinforcement learning algorithm, which figures out the rest.”









Comments are closed.